튜토리얼 및 샘플
Haply 인버스 유니티 패키지는 패키지의 기능을 설명하고 실습을 통해 학습할 수 있도록 설계된 튜토리얼과 샘플 프로젝트 모음으로 구성되어 있습니다. 이러한 리소스는 초보자와 고급 사용자 모두를 대상으로 하며, 햅틱 인터랙션의 기본을 익히고 보다 정교한 사용 사례를 살펴볼 수 있는 단계별 접근 방식을 제공합니다.
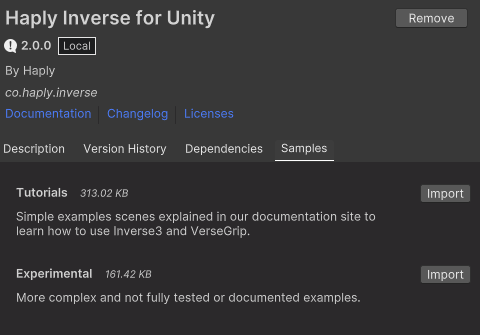
튜토리얼 및 샘플에 액세스하기
튜토리얼 샘플 프로젝트는 Unity 패키지 관리자를 통해 쉽게 사용할 수 있으므로 프로젝트 내에서 쉽게 통합하고 실험해 볼 수 있습니다.
튜토리얼 개요
인버스 유니티 패키지( Haply )의 숙련도를 높일 수 있도록 설계된 종합 튜토리얼을 살펴보세요. 기본 개념부터 고급 햅틱 피드백 메커니즘까지, 이 가이드는 단계별 이해를 돕기 위해 세심하게 제작되었으며 코드 예제와 실용적인 인사이트가 풍부하게 포함되어 있습니다.
기본 힘과 위치
이 가이드에서는 힘을 가하고 Inverse3 커서의 움직임을 시각화하는 간단한 데모를 제공합니다.
기본 포스 피드백
이 튜토리얼에서는 강성과 댐핑을 모두 통합하여 구와 같은 정적 물체와의 접촉 시 물리적 특성을 시뮬레이션하는 기본적인 햅틱 시뮬레이션을 만드는 방법을 안내합니다.
장치 작업 공간 변환
이 튜토리얼에서는 공간 변환 속성 및 방법을 사용하여 Inverse3 장치의 위치, 회전 및 배율을 조정하는 방법을 보여줌으로써 기본 포스 피드백 튜토리얼을 확장합니다.
동적 장면에서의 포스 피드백
이 가이드에서는 기본 포스 피드백 튜토리얼을 기반으로 Unity 내에서 동적 상호작용을 시뮬레이션하여 사용자가 움직이는 오브젝트에서 포스 피드백을 느낄 수 있도록 하는 방법을 소개합니다.
간단한 위치 제어
이 튜토리얼에서는 시작 가이드에 소개된 개념을 기반으로 Unity 씬 내에서 동적 게임 오브젝트를 사용하여 Inverse3 디바이스의 커서 위치를 제어하는 방법을 보여줍니다.
VerseGrip 위치 제어
이 튜토리얼에서는 VerseGrip의 회전을 사용하여 Inverse3 장치의 커서 위치를 직접 제어하고, 빈도가 높은 업데이트를 위해 Unity 메인 스레드를 우회하는 방법을 보여드립니다.
각 튜토리얼은 점진적으로 기술을 향상시켜 Haply 의 고급 햅틱 기술을 활용하여 촉각적으로 매력적인 인터랙티브 경험을 만들 수 있도록 설계되었습니다.
실험 샘플
이 패키지에는 체계적인 튜토리얼 외에도 고급 사용 사례를 테스트하는 실험적인 샘플이 포함되어 있습니다. 이러한 샘플은 문서화가 덜 되어 있으며 Haply 하드웨어로 가능한 것의 한계를 시험하는 탐색용 프로젝트로 간주해야 합니다. 잠재적인 애플리케이션을 엿볼 수 있으며 패키지의 고급 기능을 실험해 볼 수 있습니다.
결론
햅틱 기술을 처음 접하든 지식을 넓히고 싶든, Haply 인버스 유니티 패키지와 함께 제공되는 튜토리얼과 샘플은 귀중한 인사이트와 실무 경험을 제공합니다. 이러한 리소스를 통해 Unity 프로젝트에 햅틱 피드백을 통합하여 더욱 몰입감 있는 인터랙티브 경험을 제작하는 방법에 대해 더 깊이 이해할 수 있습니다.
실험용 샘플은 혁신을 위한 출발점이라는 점을 기억하세요. Haply 하드웨어와 Unity의 강력한 개발 환경의 기능을 살펴보고 햅틱 인터랙션 디자인의 한계를 뛰어넘을 수 있는 기회로 초대합니다.