HARP 인간 고급 로봇 플랫폼) 시작하기
이 글에서는 HARP 기본 작동 및 설정 방법에 대해 설명합니다. 이 글을 다 읽으시면, 시스템에 연결된 로봇을 원격으로 조작할 수 있게 될 것입니다.
시작하기 전에
이 단계에서는 사용자가 이미 Inverse3 시작하기’ 및 ‘VerseGrip 스타일러스 시작하기’ 가이드를 참고하여 기기를 설정해 두셨다고 가정합니다.
HARP 설치
HARP 실행 후 설치 프로그램을 실행하십시오. 설치 과정은 간단하며, 완료되면 응용 프로그램이 자동으로 실행됩니다.
HARP 이미지
라이선스 유효성 확인
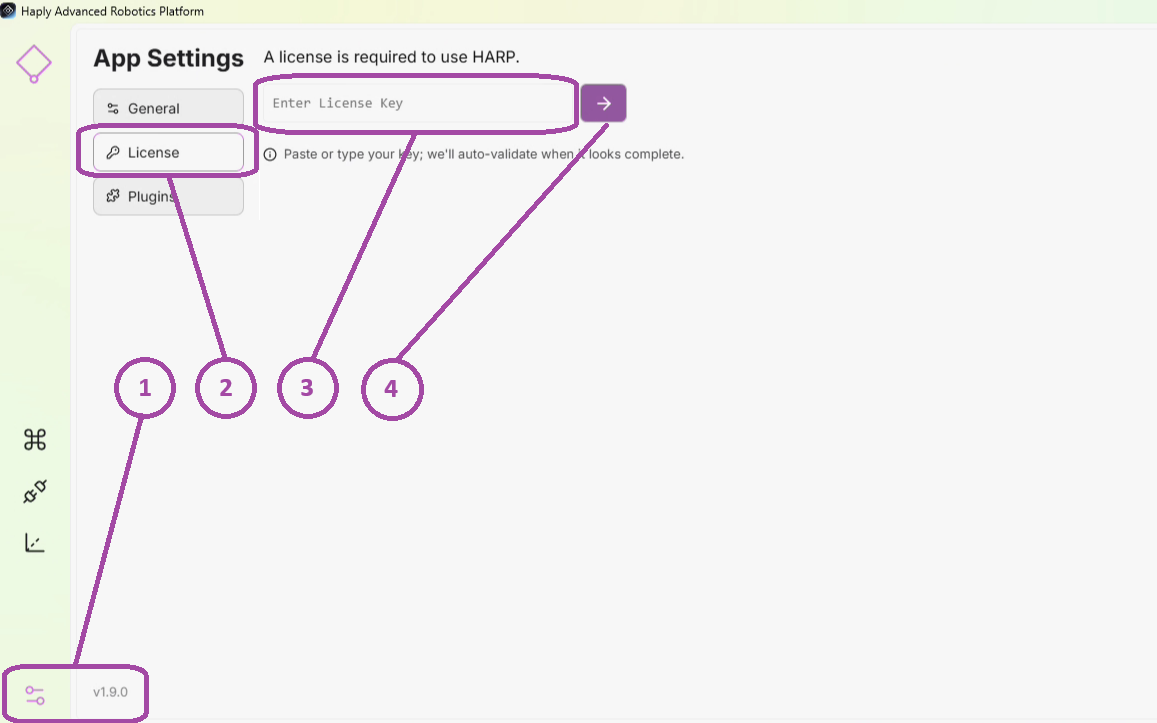
HARP (1) 설정으로 이동하고 (2) 라이선스 메뉴를 선택하세요. (3) 라이선스 키를 입력하고 (4) 클릭하여 라이선스를 인증하세요.
프로젝트 만들기
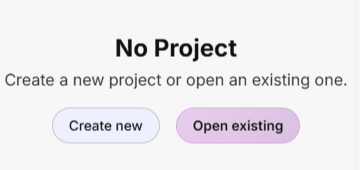
먼저 새 프로젝트를 생성하세요. 프로젝트 이름을 지정하고 프로젝트가 저장될 디렉터리를 선택하세요.
장치 연결
리더 기기
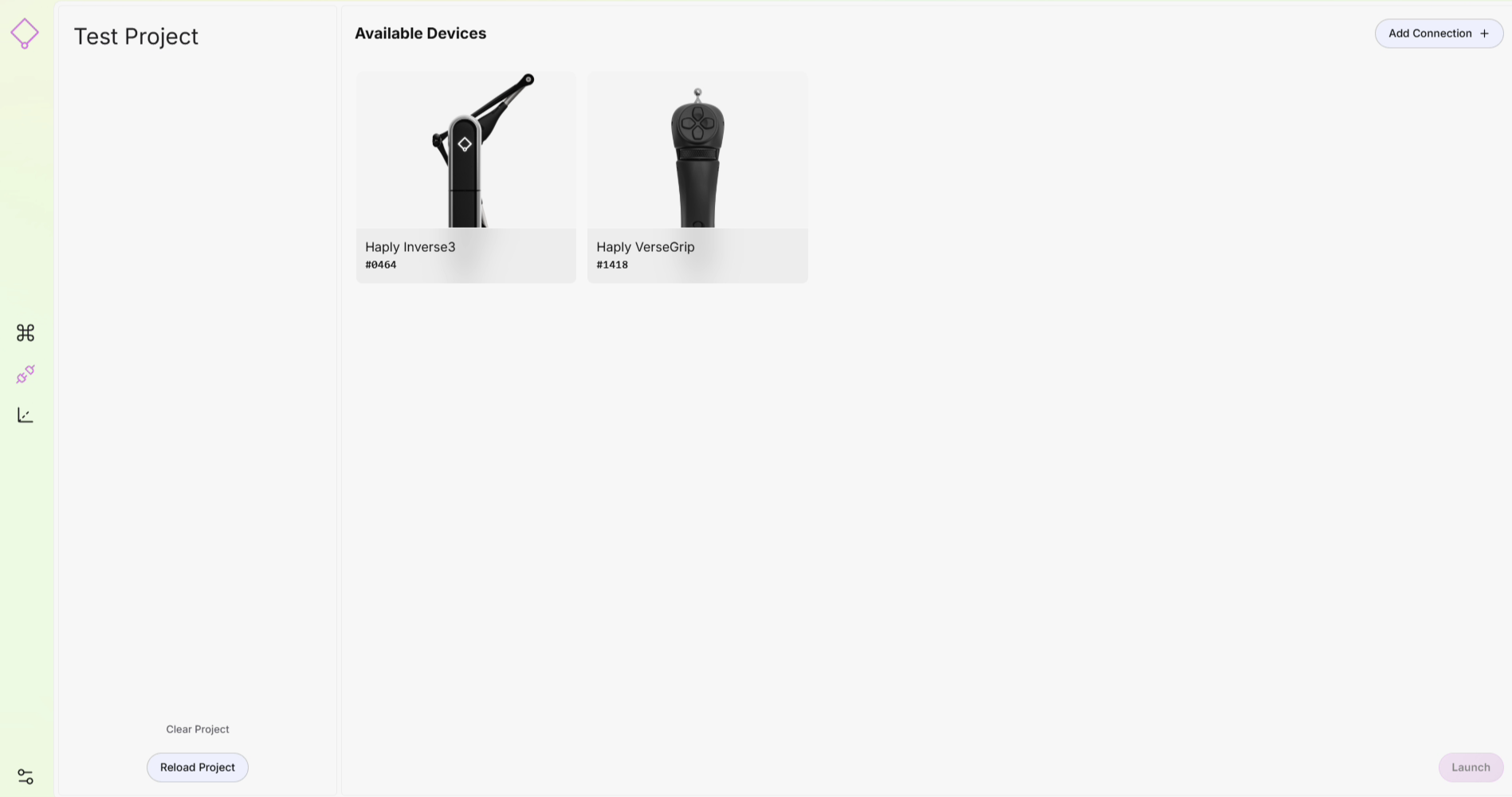
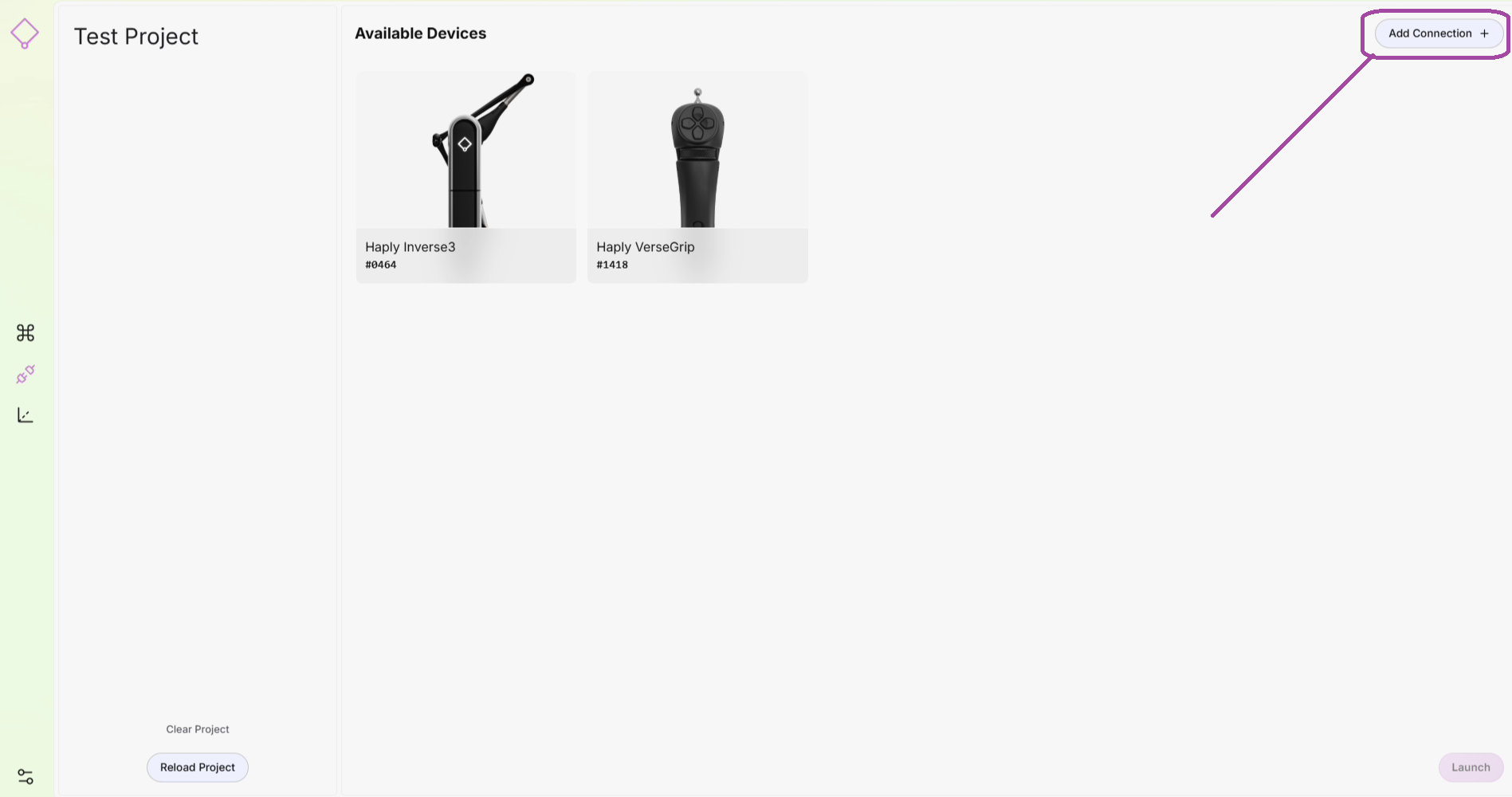
리더 기기가 연결되어 있는지 확인하십시오. 화면에 Inverse 3 VerseGrip이 표시되어야 합니다. 기기 중 하나가 보이지 않는 경우, 전원을 확인하고 VerseGrip용 USB 동글이 PC에 연결되어 있는지 확인하십시오.
연동 기기
팔로워 장치를 연결하기 위해 ‘연결 추가’ 기능을 사용하면 로봇, 힘/토크 센서 및 엔드 이펙터에 연결할 수 있습니다.
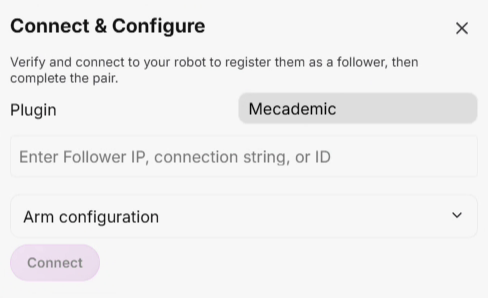
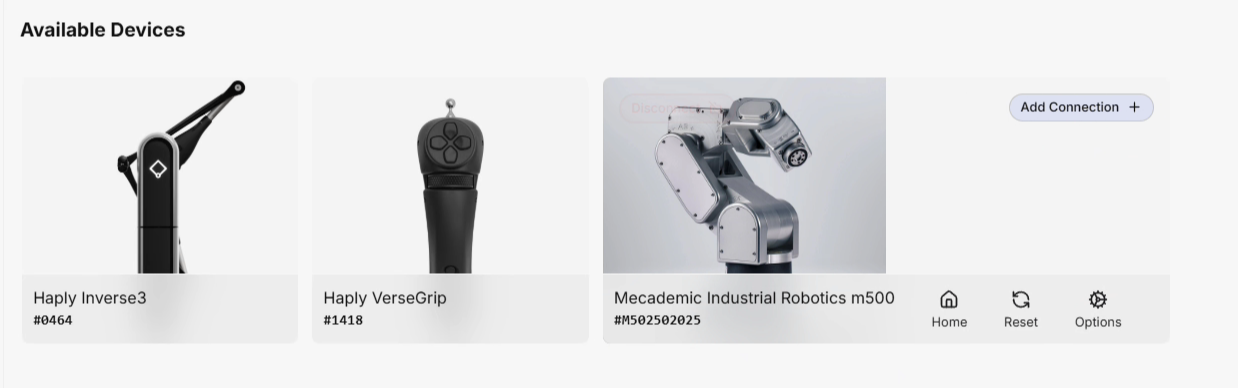
로봇 팔부터 시작하여 드롭다운 목록에서 로봇을 선택하고 연결 문자열을 입력하세요. 연결을 누르세요
그리퍼를 추가하고, 연결된 로봇 타일에서 ‘연결 추가’를 클릭하세요.
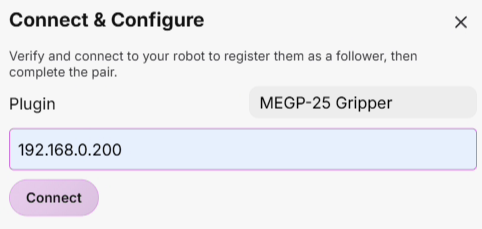
드롭다운 메뉴에서 엔드 이펙터를 선택하고 연결 문자열을 입력하세요. ‘연결’을 누르세요.
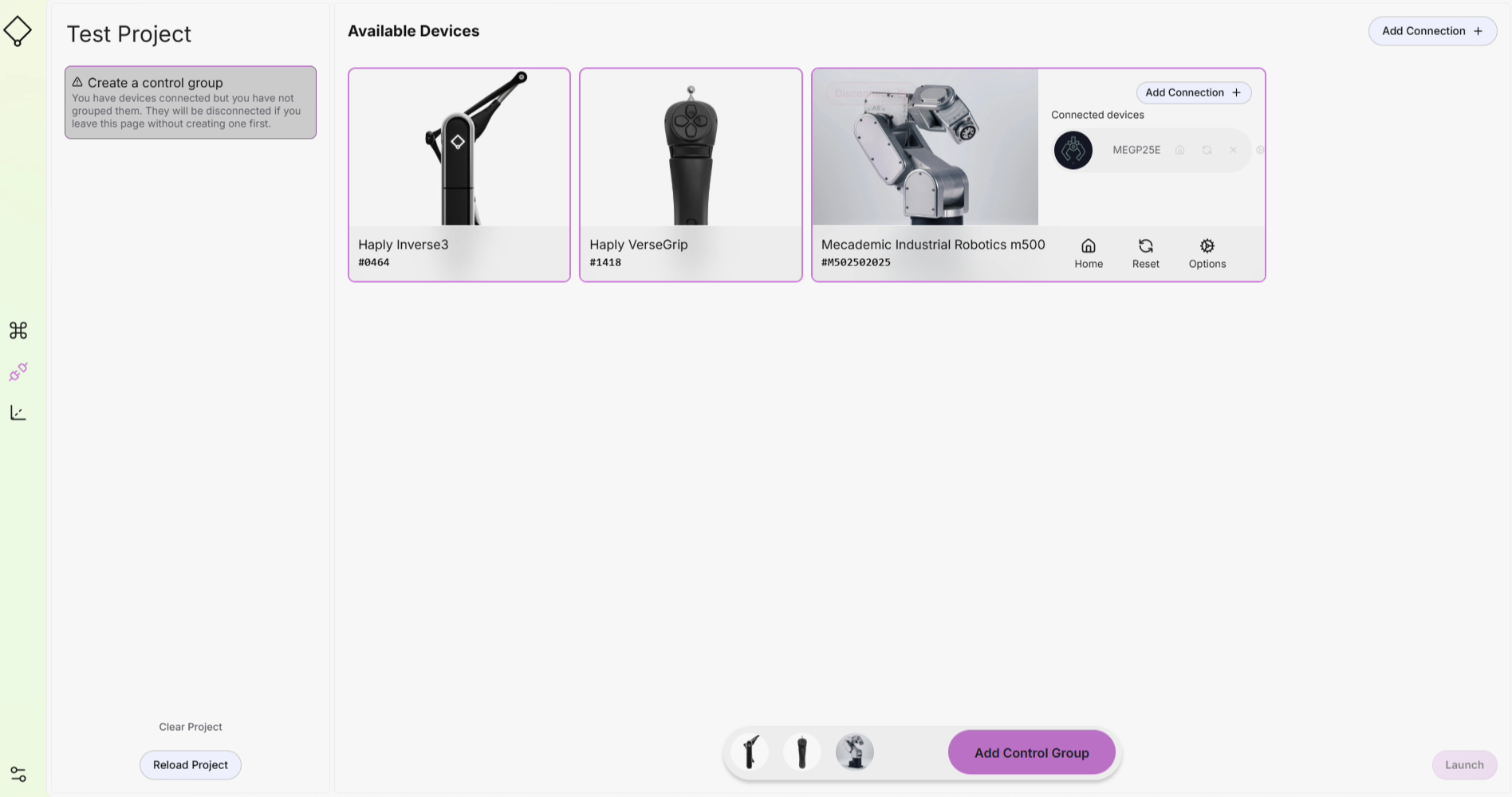
이제 기기의 전원이 켜지고 연결되었으니, 제어 그룹을 만들어 보겠습니다. 제어 그룹에 포함할 기기 타일을 하나씩 클릭하세요. 선택한 기기들이 하단에 모이면, ‘제어 그룹 추가’ 버튼을 누르세요.
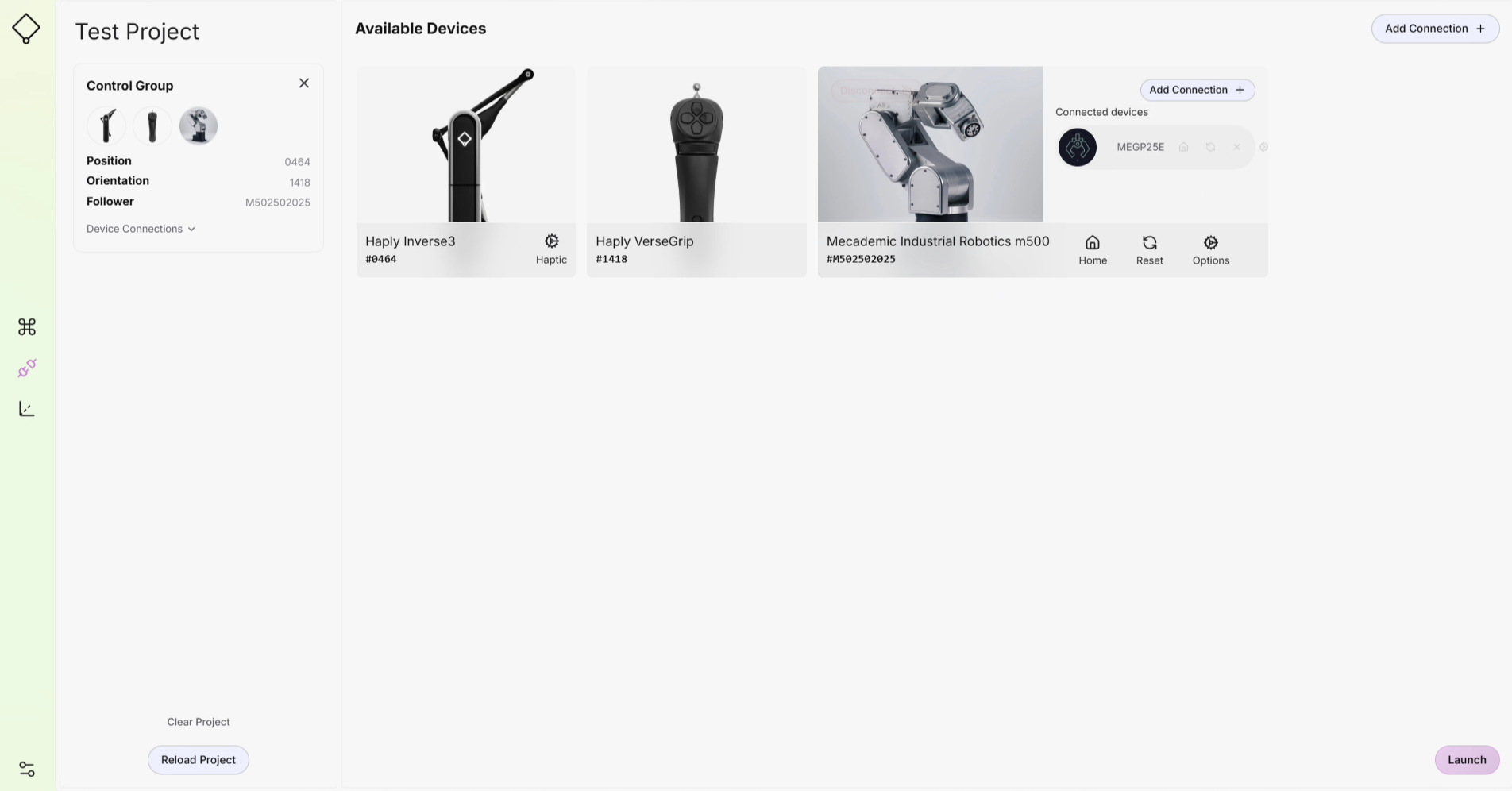
왼쪽의 프로젝트 창에서 대조군을 확인할 수 있습니다.
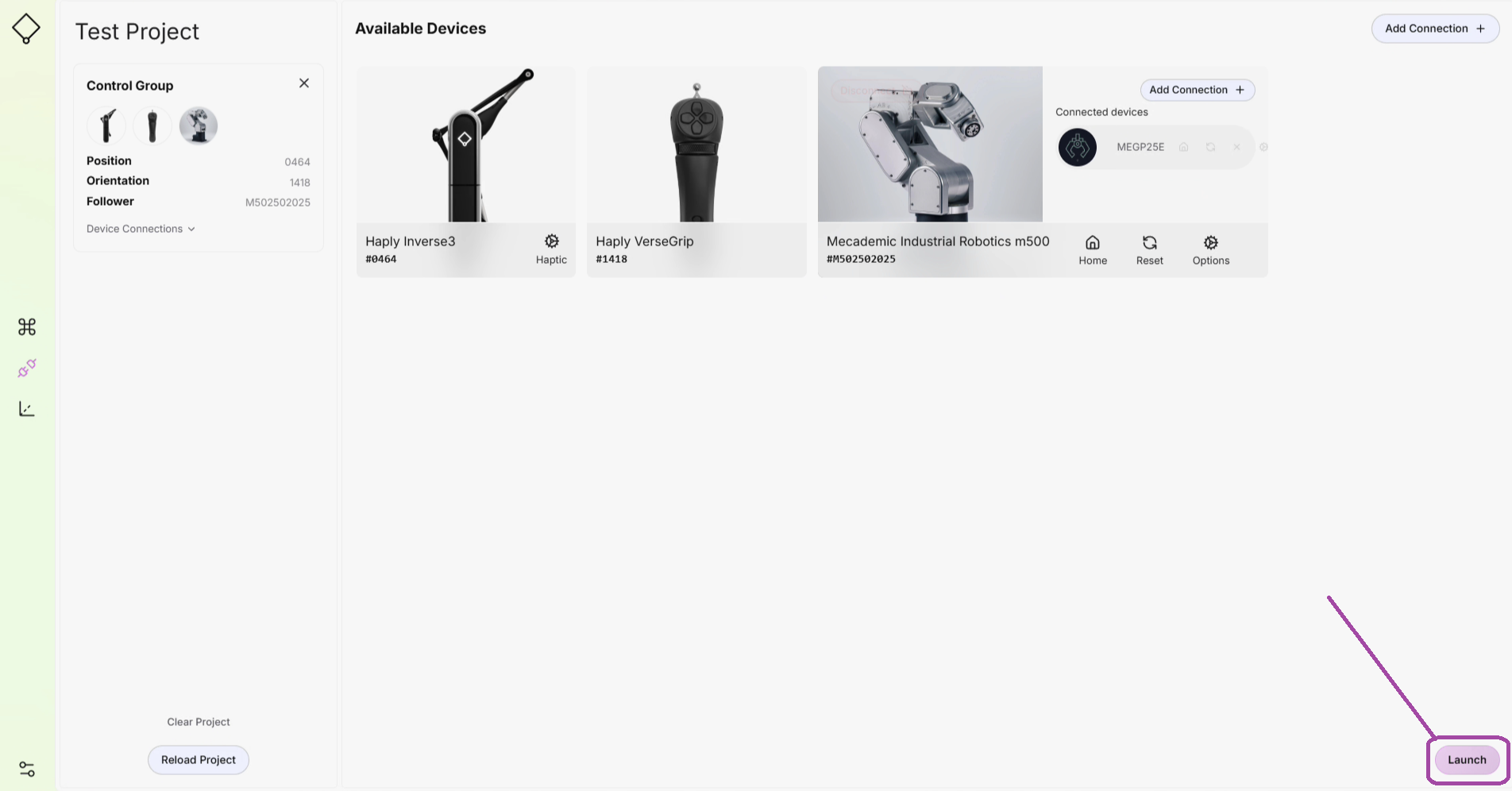
모든 연결을 완료하셨습니다. ‘실행’ 버튼을 눌러 제어 화면으로 이동하면 로봇을 조종할 수 있습니다.
원격 조작
지금은 아무런 제한이나 경계가 없습니다. 안전을 최우선으로 하고, 서두르지 말고, 본격적인 제어 작업을 시작하기 전에 시스템이 어떻게 작동하는지 먼저 파악하세요.
STOP 버튼(오른쪽 하단)을 누르면 RESET 버튼을 누를 때까지 로봇의 움직임을 멈출 수 있습니다. (ESC 키를 누르면 로봇이 멈춥니다)
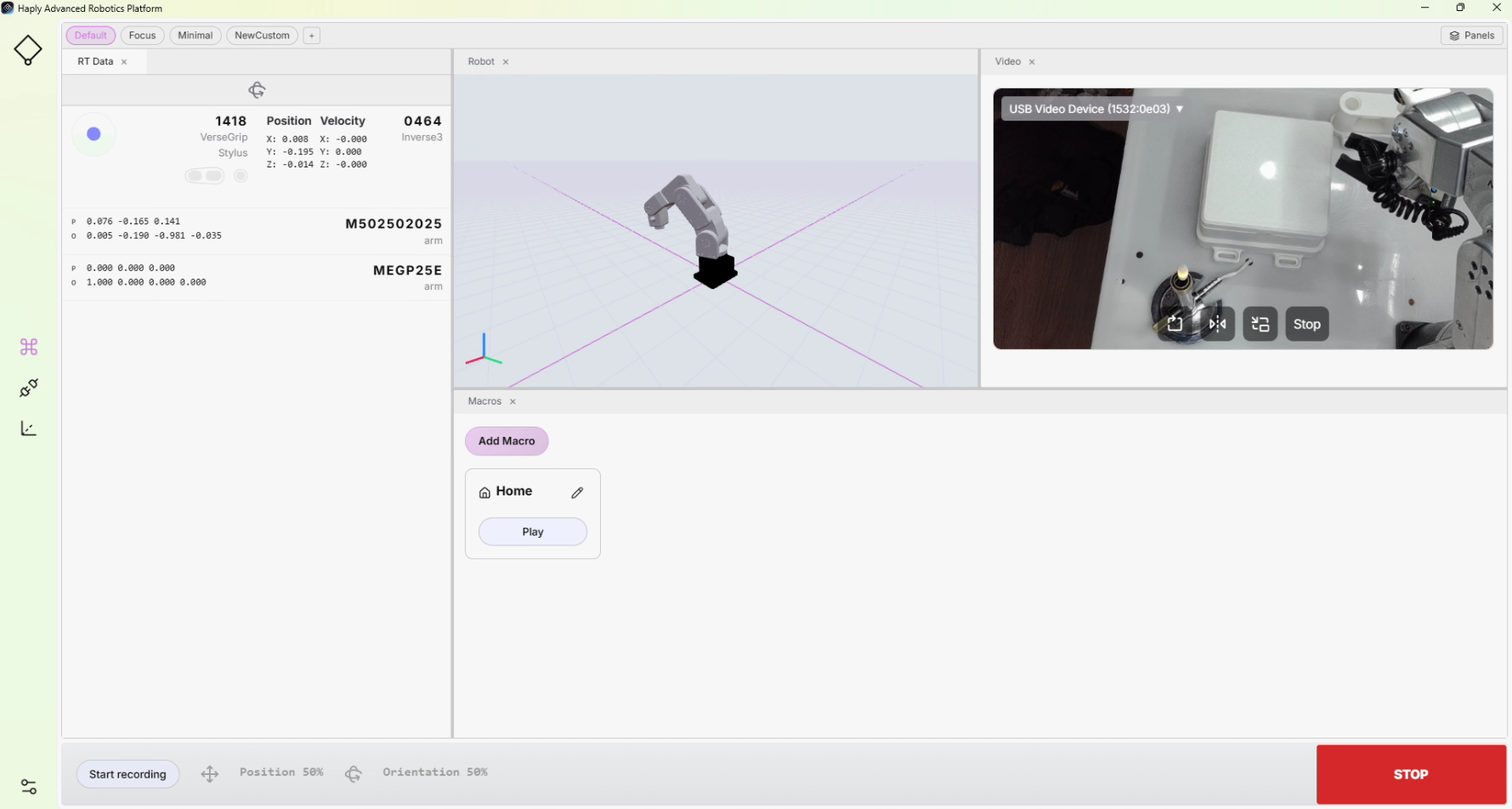
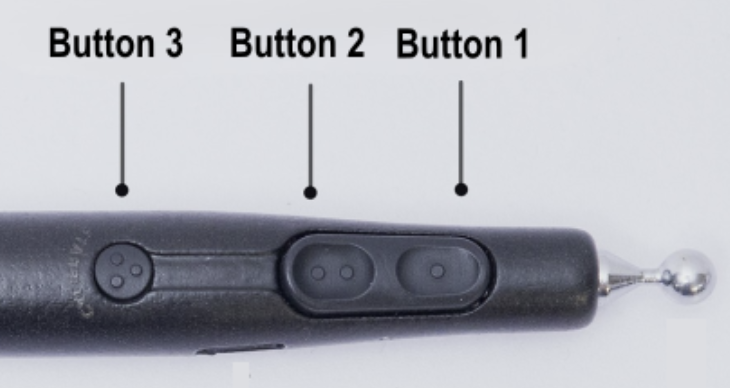
VerseGrip은 버튼 1을 클러치 용도로 사용합니다.
- 클러치가 눌려 있지 않음 — 로봇이 움직이지 않으므로 장치를 자유롭게 이동할 수 있습니다.
- 클러치 압착 — Inverse 3 로봇도 함께 움직입니다.